Robust Perceptive Localization and Mapping in Challenging Environments
Biography
Currently, I am a Ph.D. student at ETH Zurich, Robotic Systems Lab. I graduated from my master’s degree Robotics, Systems and Control at ETH Zurich, Switzerland. Before that, I received my bachelor’s degree in Mechanical Engineering with first place in my cohort and I recieved my second bachelor degree in Control Engineering and Automation.
My research mainly focuses on incorporating state-of-the-art optimization and machine learning approaches into robust localization and mapping frameworks. Specifically, I specialize in robust localization and perception in degenerate and challenging environments utilizing optimization and learning based methods. Additionally, I am highly interested in multi-modal fast volumetric mapping and efficient and consistent local and global representations.
For more information, please refer to my Curriculum Vitae and Project Portfolio.
- Robust Localization and Mapping
- Self-Supervised Hybrid Machine Learning
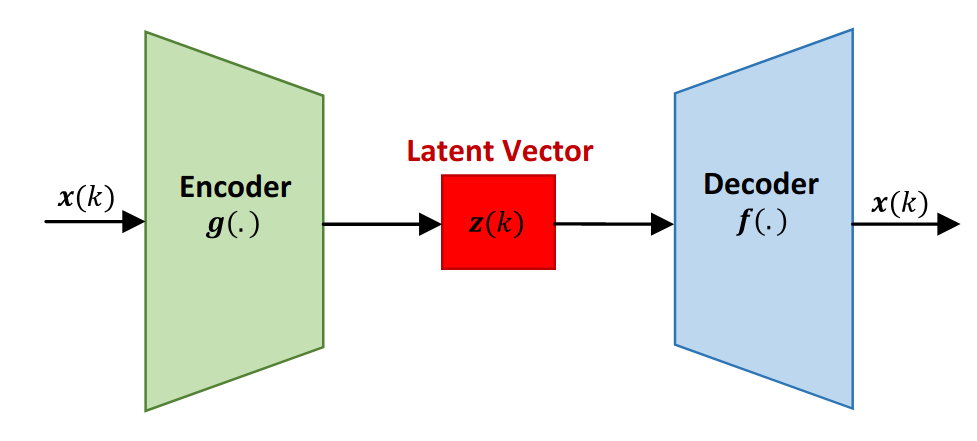
- Implicit Environment Representations
- Robust Sensor Fusion
-
MSc in Robotics, Systems and Control
ETH Zurich
-
BSc in Control and Automation Engineering
Istanbul Technical University
-
BSc in Mechanical Engineering
Istanbul Technical University
Updates
2023
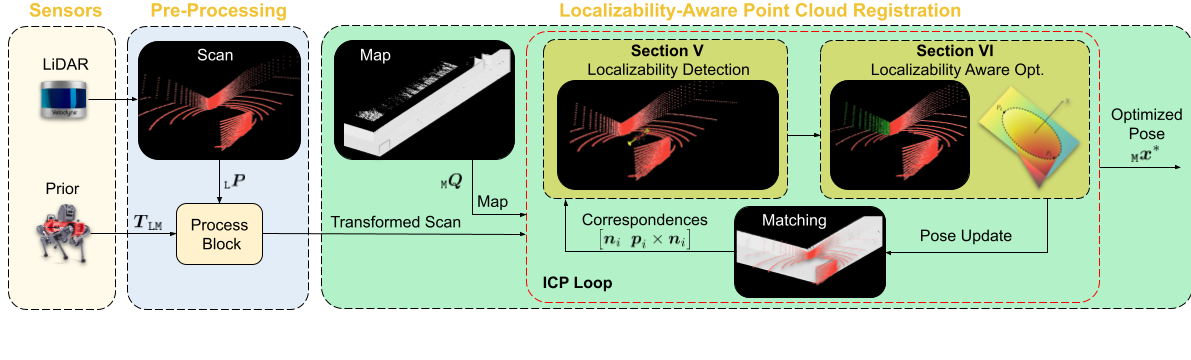
Feb 07: X-ICP, my latest T-RO journal submission got positive review!
Revising my latest submission for publication for the next stage of the review process.Feb 03: Started to my Ph.D. studies in RSL.
In my Ph.D. studies I am focusing on robust localization and mapping in degenerate environments. Particularly interested in global and local consistency of the generated environments improved and aided by hybrid learning methods.2022
May 01: Started as a Scientific Researcher at RSL.
Right after my master MSc thesis, I started working on online mesh generation and dense mapping tool at RSL.April 27: Successfully defended my MSc Thesis.
I have defended my MSc Thesis successfully in the form of a presentation and Q&A session.2021
March 01: I started my internship at ANYbotics AG.
I started my internship at ANYbotics AG as a perception intern working on robust global localization and sensor fusion odometry systems.2020
Sep 01: I started my semester project at Autonomous Systems Lab (ASL), ETH Zurich, Switzerland.
My semester project focused on Mid-air Initialization of an Agile Drones with Filter based localization. We relied on IMU and RGB data to estimate gravity vector orientation and IMU biases to jump start filter based localization.2019
July 27: I received my second bachelor degree on Control Engineering and Automation. Istanbul, Turkey.
I graduated from my second bachelor degree on Control engineering and automation.2018
June 26: I was awarded my first Bachelor degree at Istanbul Technical University, Istanbul, Turkey.
Received my first bachelor degree in Mechanical Engineering.2015
March 01: I started my second bachelor major, Control Engineering and Automotion at Istanbul Technical UNiversity..
XXFeatured Publications

Experience
Robotic Platforms
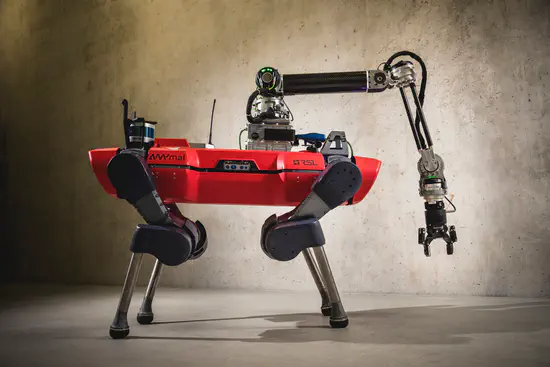
ALMA
ALMA is an ANYmal that is equipped with a robotic arm designed for articulated locomotion and manipulation.

ANYmal C
ANYmal is a unique legged robot that provides reliable industrial solution with autonomous robot inspection.

ANYmal D
ANYmal-D is the next generation ANYmal equipped with 6 D435 depth cameras, 2 Wide-angle RGB cameras, a IMU and a VLP-16 LiDAR in addition to the joint encoders.
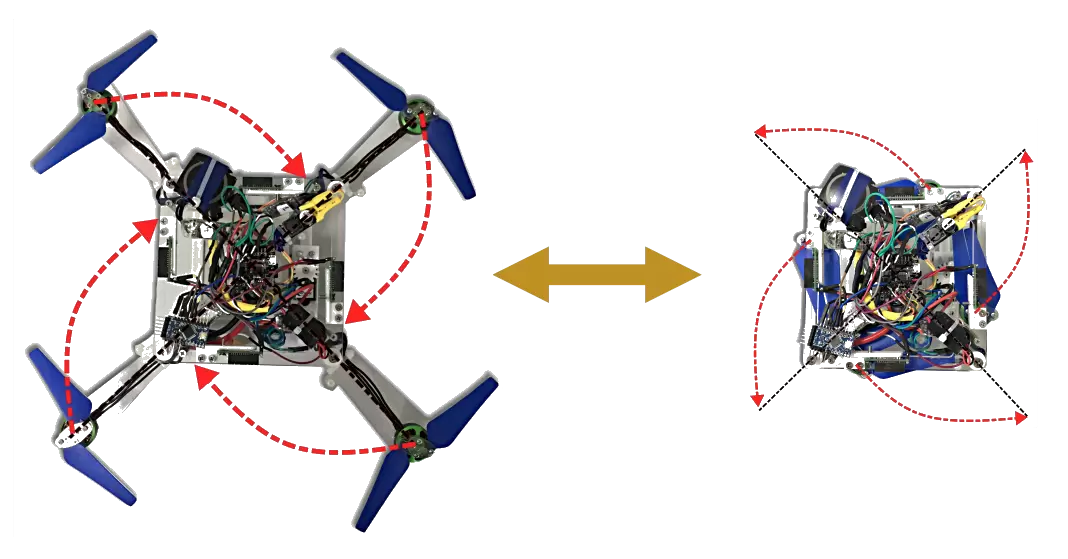
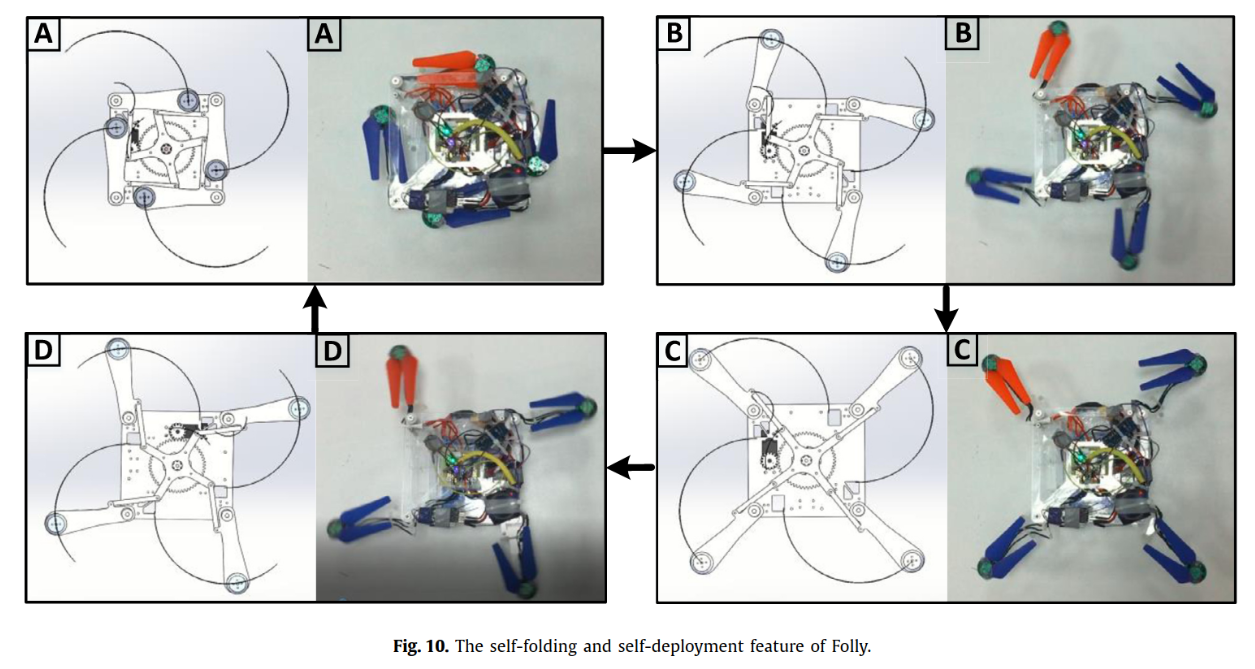
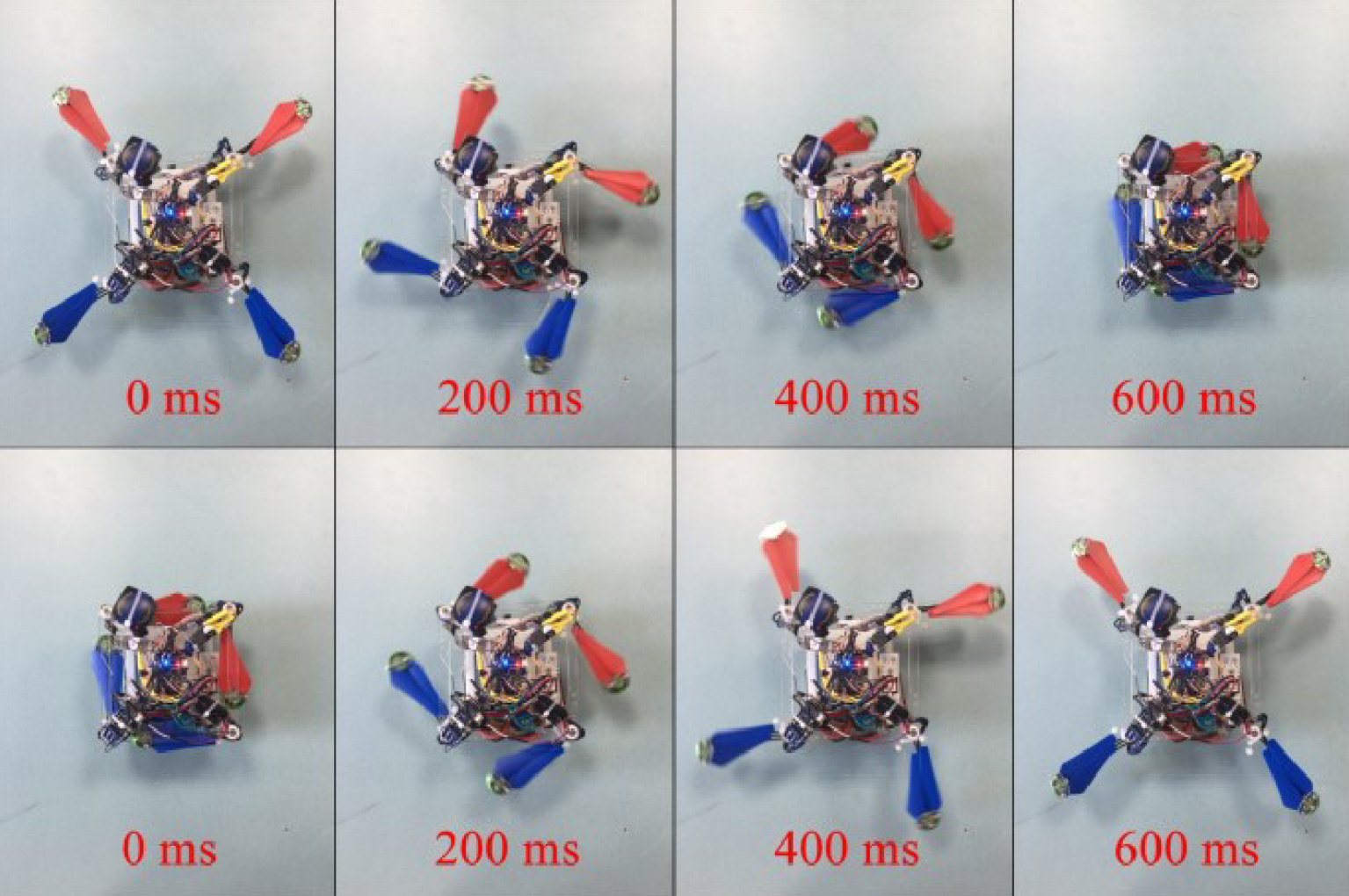
Folly
Folly is a self-foldable and self-deployable drone designed and produced during my BSc Thesis in Mechanical Engineering which is under patent protection. Folly is a ~ 1 kg quadcopter with 18 minute battery life that is designed for confined space applications.

SuperMegaBot
SuperMegaBot is a wheeled automonous ground robot for eduation, and research in autonomous inspection. The current mechanical design is a product of my work at ASL as a HiWi.
Contact
- Rämistrasse 101, 8092 Zurich
- tutuna@ethz.ch
- Connect with me