Deep learning frameworks to learn prediction and simulation focused control system models
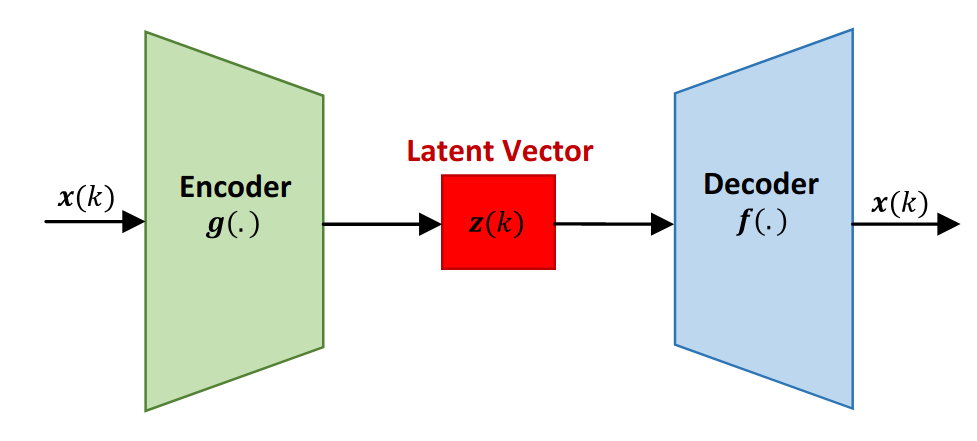 Autoencoder Structure
Autoencoder Structure
Abstract
In this paper, we present DL frameworks that are developed to provide novel approaches as solutions to the non-linear system identification and time series prediction problems. The proposed DL frameworks leverage the advantages of autoencoders and long-short term memory network, which are known being data compression and recurrent structures, respectively, to design Deep Neural Networks (DNN) for modeling time series and nonlinear systems with high performance. We provide recommen- dations on how deep AEs and LSTMs should be utilized to end up with efficient Prediction-focused (Pf) and Simulation-focused (Sf) DNNs for time series and system identification problems. We present systematic learning methods for the DL frameworks that allow straightforward learning of Pf-DNN and Sf-DNN models in detail. To demonstrate the efficiency of the developed DNNs, we present various comparative results conducted on the benchmark and real-world datasets in comparison with their conventional, shallow, and deep neural network counterparts
Turcan Tuna
PhD Candidate at Robotic Systems Lab, ETH Zurich
My research mainly focuses on incorporating state-of-the-art optimization and machine learning approaches into robust localization and mapping frameworks. Specifically, I specialize in robust localization and perception in degenerate and challenging environments utilizing optimization and learning based methods. Additionally, I am highly interested in multi-modal fast volumetric mapping and efficient and consistent local and global representations.