X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments
 X-ICP Overview, copyright IEEE.
X-ICP Overview, copyright IEEE.
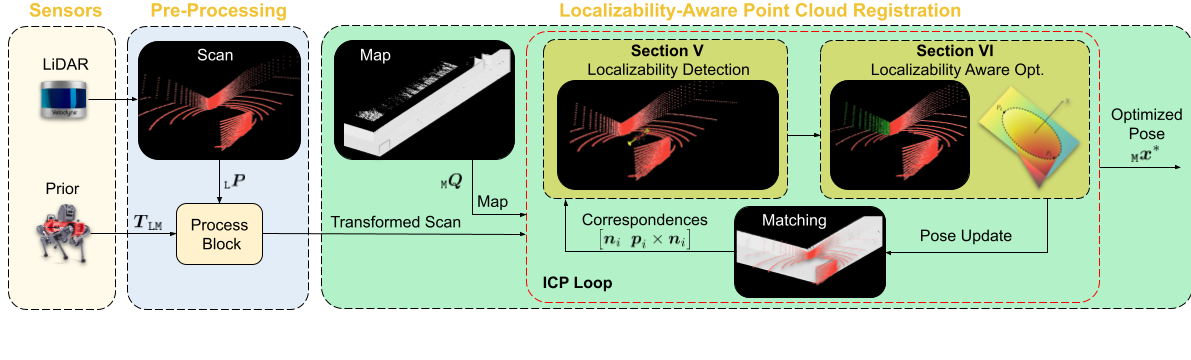
As a response to the problem of LiDAR degeneracy, this work proposes a robust localizability-aware point cloud registration framework, X-ICP, that enables LiDAR-based SLAM systems to operate in featureless eXtreme environments. The proposed framework solves both the detection and mitigation of degeneracy.
 X-ICP Registration, copyright IEEE.
X-ICP Registration, copyright IEEE.
Abstract
In this work we propose i) a robust multi-category (non-)localizability detection module, and ii) a localizability-aware constrained ICP optimization module and couples both in a unified manner. The proposed localizability detection is achieved by utilizing the correspondences between the scan and the map to analyze the alignment strength against the principal directions of the optimization as part of its multi-category LiDAR localizability analysis. In the second part, this localizability analysis is then tightly integrated into the scan-to-map point cloud registration to generate drift-free pose updates along well-constrained directions.
Turcan Tuna
PhD Candidate at Robotic Systems Lab, ETH Zurich
My research mainly focuses on incorporating state-of-the-art optimization and machine learning approaches into robust localization and mapping frameworks. Specifically, I specialize in robust localization and perception in degenerate and challenging environments utilizing optimization and learning based methods. Additionally, I am highly interested in multi-modal fast volumetric mapping and efficient and consistent local and global representations.